RoboSense launches intelligent autonomous driving LiDAR system
September 21, 2018
By
CCE
The RS-IPLS Intelligent Perception LiDAR system is the first hardware and software algorithm based solution for the mass production of safer autonomous cars.

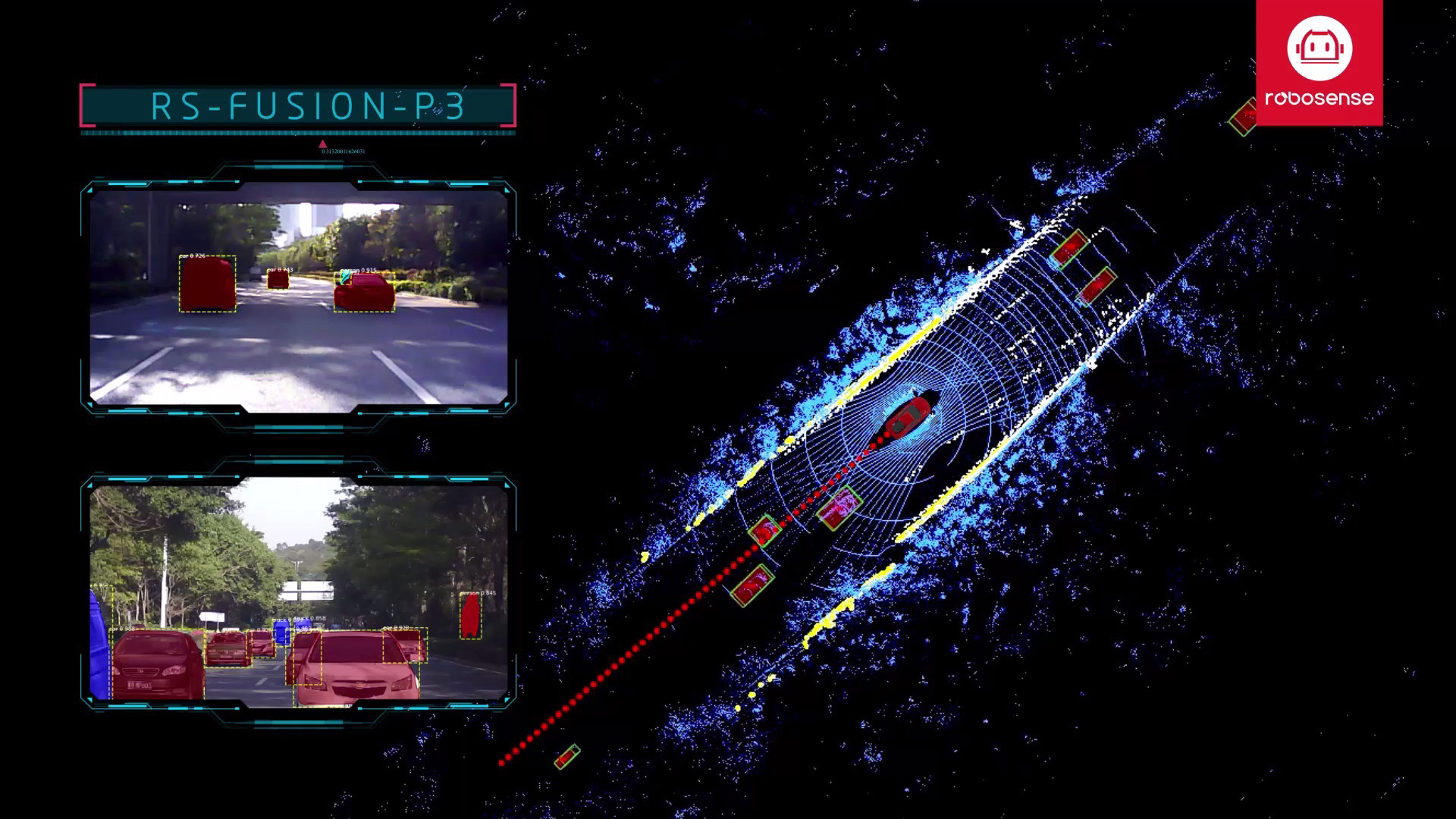
RoboSense RS-IPLS display.
RoboSense, has announced its RS-IPLS Intelligent Perception LiDAR system, the first hardware and software algorithm based solution for the mass production of safer autonomous cars.
A high performance autonomous driving system, the RS-IPLS features real-time data pre-processing and a “gaze” function similar to human eyes. The RoboSense system is also 1/400th the price of traditional 64-line LiDAR systems, and is designed for the mass production of vehicles at a low price.
Based on high-performance MEMS solid-state LiDAR, the RS-IPLS system outputs high resolution colour point cloud data by merging the underlying hardware of 2D imagery with the RoboSense RS-LiDAR-Algorithm deep learning sensing algorithm developed specifically for autonomous driving. The detection algorithm achieves target level information that adjusts the Region of Interest (ROI) detection area in real-time with no delay.
The algorithm is based on the RoboSense team’s 10 years of research and technology experience in the field of LiDAR environment-aware algorithms.
When the system’s field of view perceives a target of interest, it initiates a “gaze” processing mechanism that instantly locks the target for ROI processing, achieving clear and stable environmental data. The LiDAR under-the-system architecture maintains a high degree of vigilance of the surrounding environment, constantly capturing the areas of interest, allowing the “gaze” to transfer efficient and high-quality feedback in the field of view.
The RoboSense RS-IPLS Intelligent Perception LiDAR system also provides richer three-dimensional spatial data information (X, Y, Z, R, G, B) in real-time from the bottom layer, which reduces the time delay normally caused by external fusion. Data pre-processing is performed by the AI algorithm, with the area of interest repeatedly detected for farther detection distance and more accurate perception results for autonomous driving, with reduced data processing stress to the central data processing unit.
http://www.robosense.ai