
GeoSLAM launches Desktop V3
February 2, 2017
By
Canadian Consulting Engineer
GeoSLAM Desktop V3 incorporates a 2D and 3D viewer so registered point clouds can be immediately viewed without moving to third-party software.
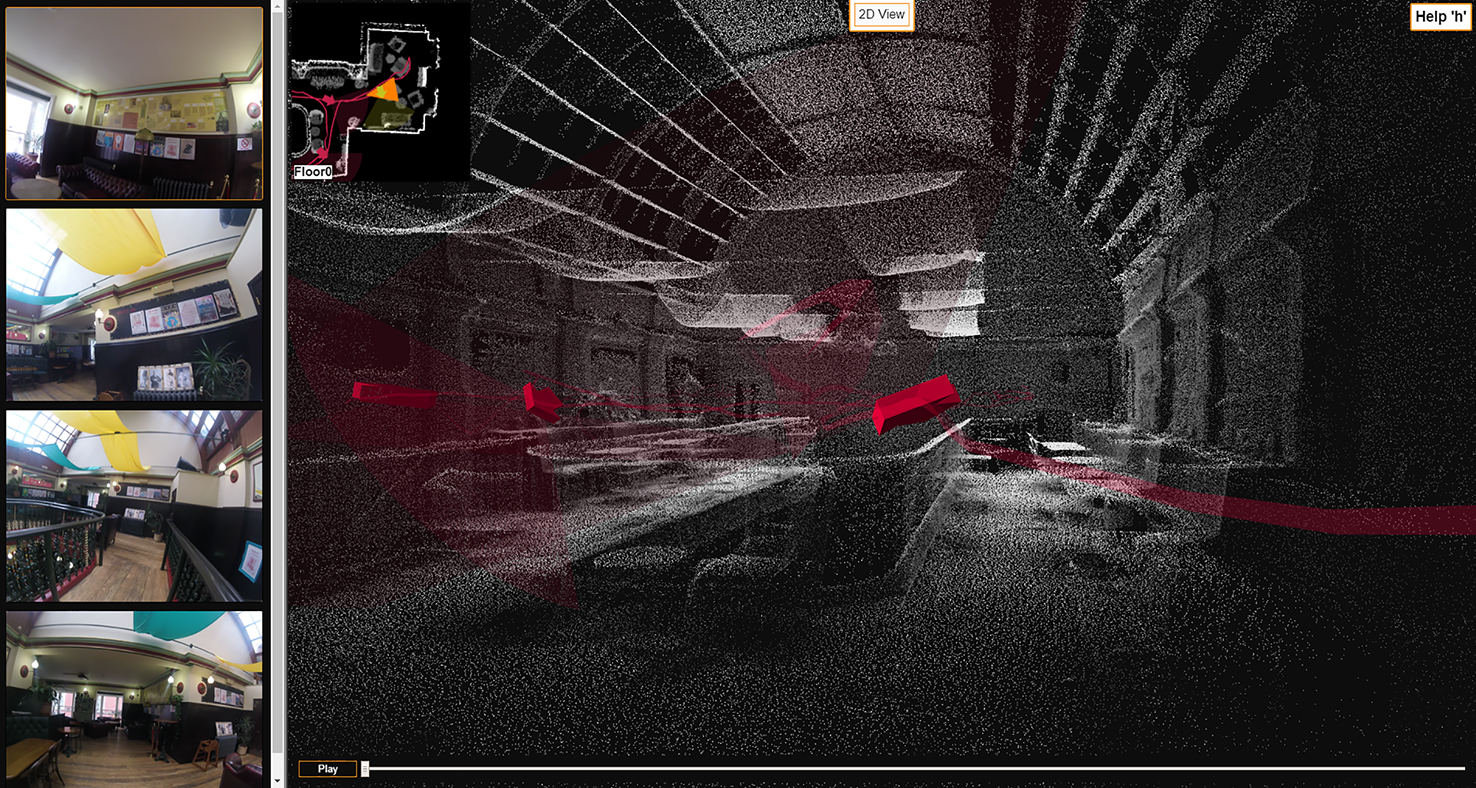
GeoSLAM Desktop V3
GeoSLAM, the pioneer of SLAM (Simultaneous Localization and Mapping)-based mobile indoor mapping systems, has announced the launch of Desktop V3, providing users with increased functionality to view, edit, and define results.
GeoSLAM Desktop V3 incorporates a 2D and 3D viewer so registered point clouds can be immediately viewed without moving to third-party software. Used in conjunction with the ZEB-CAM camera accessory, it is possible to visualize the synchronized imagery alongside the point cloud within the viewer. This additional contextual information proves valuable for feature identification within the point cloud.
For the first time, it is now possible for users to modify and improve SLAM registration results. Following the implementation of user definable SLAM parameters, the user can now optimize processing to suit the environment in which data was collected. Users can choose from ers can choose from a range of parameters including bounding box size, place recognition, loop closure, and the ability to end processing early. Such advancements now put the power of data processing directly into the hands of the user.
Once point cloud registration has been optimized, Desktop V3 allows users to select from a large range of output options including format, point & spatial decimation, normal, time-stamping and point rendering. This wide array of user-defined outputs allows for ever-greater integration with third-party point cloud post processing packages.
For the first time, it is possible for users to modify and improve SLAM registration results. Following the implementation of user definable SLAM parameters, the user can now optimize processing to suit the environment in which data was collected. Users can choose from a range of parameters including bounding box size, place recognition, loop closure and the ability to end processing early.
Once point cloud registration has been optimized, Desktop V3 allows users to select from a range of output options including format, point & spatial decimation, normal, time-stamping and point rendering. This array of user-defined outputs allows for greater integration with third-party point cloud post processing packages.
For more information visit www.geoslam.com